
Nació en Inglaterra el 4 de enero de 1643. Entonces, el calendario usado era el juliano y correspondía al 25 de diciembre de 1642, día de la Navidad.El parto fue prematuro aparentemente y nació tan pequeño que nadie pensó que lograría vivir mucho tiempo. Su vida corrió peligro por lo menos durante una semana. Fue bautizado el 1 de enero de 1643, 12 de enero en el calendario gregoriano.
La casa donde nació y vivió hasta su juventud se ubica en el lado oeste del valle del río Witham, más abajo de la meseta kesteven, en dirección a la ciudad de Grantham. Es de piedra caliza gris, el mismo material que se encuentra en la meseta. Tiene forma de una letra T gruesa en cuyo trazo más largo se encuentran la cocina y el vestíbulo, y la sala se encuentra en la unión de los dos trazos. Su entrada es descentrada y se ubica entre el vestíbulo y la sala, y se orienta hacia las escaleras que conducen a dos dormitorios del piso superior.
Sus padres fueron Isaac Newton y Hannah Ayscough, dos campesinos puritanos. No llegó a conocer a su padre, pues había muerto en octubre de 1642.
LAS LEYES DE ISAAC NEWTON
PRIMER LEY :LA INERCIA
Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuya resultante no sea nula. Newton toma en consideración, así, el que los cuerpos en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos una fuerza, pero nunca entendiendo como esta a la fricción.
En consecuencia, un cuerpo que se desplaza con movimiento rectilineo uniformemente acelerado implica que no existe ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es porque sobre ese cuerpo se ha ejercido una fuerza neta.
Newton descubrió la ley de la inercia, la tendencia de un objeto en movimiento a continuar moviéndose en una línea recta, a menos que sufra la influencia de algo que le desvíe de su camino. Newton supuso que si la Luna no salía disparada en línea recta, según una línea tangencial a su órbita, se debía a la presencia de otra fuerza que la empujaba en dirección a la Tierra, y que desviaba constantemente su camino convirtiéndolo en un círculo. Newton llamó a esta fuerza gravedad y creyó que actuaba a distancia. No hay nada que conecte físicamente la tierra y la luna y sin embargo la Tierra está constantemente tirando de la Luna hacia nosotros. Newton se sirvió de la tercera ley de kepler y dedujo matemáticamente la naturaleza de la fuerza de la gravedad. Demostró que la misma fuerza que hacía caer una manzana sobre la Tierra mantenía a la Luna en su órbita.
La primera ley de Newton establece la equivalencia entre el estado de reposo y de movimiento rectilíneo uniforme. Supongamos un sistema de referencia S y otro S´ que se desplaza respecto del primero a una velocidad constante. Si sobre una partícula en reposo en el sistema S´ no actúa una fuerza neta, su estado de movimiento no cambiará y permanecerá en reposo respecto del sistema S´ y con movimiento rectilíneo uniforme respecto del sistema S. La primera ley de Newton se satisface en ambos sistemas de referencia. A estos sistemas en los que se satisfacen las leyes de Newton se les da el nombre de sistemas de referencia inerciales. Ningún sistema de referencia inercial tiene preferencia sobre otro sistema inercial, son equivalentes: este concepto constituye el principio de relatividad de Galileo o newtoniano.
El enunciado fundamental que podemos extraer de la ley de Newton es que la .
Esta expresión es una ecuación vectorial, ya que tanto la fuerza como
la aceleración llevan dirección y sentido. Por otra parte, cabe destacar
que la aceleración no es la variación de la posición, sino que es la
variación con la que varía la velocidad.
.
Esta expresión es una ecuación vectorial, ya que tanto la fuerza como
la aceleración llevan dirección y sentido. Por otra parte, cabe destacar
que la aceleración no es la variación de la posición, sino que es la
variación con la que varía la velocidad.
De la ecuación
podemos deducir que si actúan fuerzas sobre los cuerpos, el cambio que
se provoca en su aceleración es proporcional a la fuerza aplicada y
dicho cambio se produce en la dirección sobre la que se apliquen dichas
fuerzas.
Un sistema de referencia con aceleración (y la aceleración normal de un sistema rotatorio se incluye en esta definición) no es un sistema inercial, y la observación de una partícula en reposo en el propio sistema no satisfará las leyes de Newton (puesto que se observará aceleración sin la presencia de fuerza neta alguna). Se denominan sistemas de referencia no inerciales.

Por ejemplo considérese una plataforma girando con velocidad
constante, ω, en la que un objeto está atado al eje de giro mediante una
cuerda, y supongamos dos observadores, uno inercial externo a la
plataforma y otro no inercial situado sobre ella.
 y, en consecuencia, podemos considerar que un sistema de referencia de
un observador en la superficie terrestre es un sistema de referencia
inercial.
y, en consecuencia, podemos considerar que un sistema de referencia de
un observador en la superficie terrestre es un sistema de referencia
inercial.

Tras la rotura, la fuerza neta ejercida sobre la bola es 0, por lo que experimentará, como resultado de un estado de reposo, un movimiento rectilineo uniforme

El principio de supersticion establece que si varias fuerzas actúan igual o simultáneamente sobre un
cuerpo, la fuerza resultante es igual a la suma vectorial de las
fuerzas que actúan independientemente sobre el cuerpo (regla del
paralelogramo). Este principio aparece incluido en los Principia de Newton como corolario 1 después de la tercera ley, pero es requisito indispensable para la
comprensión y aplicación de las leyes, así como para la caracterización
vectorial de las fuerzas.
La fuerza modificará el estado de movimiento, cambiando la velocidad en
módulo o dirección. Las fuerzas son causas que producen aceleraciones
en los cuerpos. Por lo tanto existe una relación causa-efecto entre la
fuerza aplicada y la aceleración que se este cuerpo experimenta.
De esta ecuación se obtiene la unidad de medida de la fuerza en el sistema internacional de unidades, el Newton:
 y hay que hacer genérica la ley para que incluya el caso de sistemas en
los que pueda variar la masa. Para ello primero hay que definir una
magnitud física nueva, la cantidad del moviiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:
y hay que hacer genérica la ley para que incluya el caso de sistemas en
los que pueda variar la masa. Para ello primero hay que definir una
magnitud física nueva, la cantidad del moviiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:
La Segunda Ley de Newton solo es válida en sistema de referencias inerciales pero incluso si el sistema de referencia es no inercial, se puede utilizar la misma ecuación incluyendo las fuerzas ficticias (o fuerzas inerciales). Unidades y dimensiones de la fuerza:
 .
Es decir, es una magnitud vectorial proporcional a la masa y a la
velocidad del objeto. Partiendo de esta definición y aplicando la ley
fundamental de la mecánica de Newton, las variaciones de la cantidad de
movimiento se expresan en función de la fuerza resultante y el intervalo
de tiempo durante el cual se ejerce esta:
.
Es decir, es una magnitud vectorial proporcional a la masa y a la
velocidad del objeto. Partiendo de esta definición y aplicando la ley
fundamental de la mecánica de Newton, las variaciones de la cantidad de
movimiento se expresan en función de la fuerza resultante y el intervalo
de tiempo durante el cual se ejerce esta:
 se le denomina impulso lineal y representa una magnitud física que se
manifiesta especialmente en las acciones rápidas o impactos, tales como
choques, llevando módulo dirección y sentido. En este tipo de acciones
conviene considerar la duración del impacto y la fuerza ejercida durante
el mismo.
se le denomina impulso lineal y representa una magnitud física que se
manifiesta especialmente en las acciones rápidas o impactos, tales como
choques, llevando módulo dirección y sentido. En este tipo de acciones
conviene considerar la duración del impacto y la fuerza ejercida durante
el mismo.
De la expresión obtenida se deduce que el impulso lineal es igual a la variación de la cantidad de movimiento. Si la fuerza resultante es cero (es decir, si no se actúa sobre el objeto) el impulso también es cero y la cantidad de movimiento permanece constante. Llamamos a esta afirmación ley de conservación del impulso lineal, aplicada a un objeto o una partícula.
Sus unidades en el Sistema Internacional son

Entre las posibles aplicaciones de la Segunda Ley de Newton, se pueden destacar:


donde el segundo término representa la fuerza centrífuga.
Y la tensión es mínima, en los extremos de su trayectoria, cuando la velocidad es cero
TERCERA LEY DE NEWTON
La tercera ley de Newton establece lo siguiente: siempre que un objeto ejerce una fuerza
sobre un segundo objeto, este ejerce una fuerza de igual magnitud y
dirección pero en sentido opuesto sobre el primero. Con frecuencia se
enuncia así: A cada acción siempre se opone una reacción igual pero de
sentido contrario. En cualquier interacción hay un par de fuerzas de
acción y reacción situadas en la misma dirección con igual magnitud y
sentidos opuestos. La formulación original de Newton es:

Este principio presupone que la interacción entre dos partículas se
propaga instantáneamente en el espacio (lo cual requeriría velocidad
infinita), y en su formulación original no es válido para fuerzas
electromagnéticas puesto que estas no se propagan por el espacio de modo
instantáneo sino que lo hacen a velocidad finita "c". Este principio
relaciona dos fuerzas que no están aplicadas al mismo cuerpo,
produciendo en ellos aceleraciones diferentes, según sean sus masas. Por
lo demás, cada una de esas fuerzas obedece por separado a la segunda
ley. Junto con las anteriores leyes, esta permite enunciar los
principios de conservación del movimiento lineal y del moviento angular.
Además, la fuerza que la Luna ejerce sobre la Tierra es también responsable de las mareas, pues conforme la Luna gira alrededor de la Tierra esta ejerce una fuerza de atracción sobre la superficie terrestre, la cual eleva los mares y océanos, elevando varios metros el nivel del agua en algunos lugares; por este motivo esta fuerza también se llama fuerza de mareaLa fuerza de marea de la luna se compone con la fuerza de marea del sol proporcionando el fenómeno completo de las mareas.
AQUI TAMBIEN PODEMOS VER LOS EJEMPLOS CUANDO LA MASA NO ES CONSTANTE:
Si la masa de los cuerpos varia, como por ejemplo un cohete que va quemando combustible, no es válida la relación
y hay que hacer genérica la ley para que incluya el caso de sistemas en
los que pueda variar la masa. Para ello primero hay que definir una
magnitud física nueva, la cantidad de movimiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:
LAS LEYES DE ISAAC NEWTON
PRIMER LEY :LA INERCIA
Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuya resultante no sea nula. Newton toma en consideración, así, el que los cuerpos en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos una fuerza, pero nunca entendiendo como esta a la fricción.
En consecuencia, un cuerpo que se desplaza con movimiento rectilineo uniformemente acelerado implica que no existe ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es porque sobre ese cuerpo se ha ejercido una fuerza neta.
Newton descubrió la ley de la inercia, la tendencia de un objeto en movimiento a continuar moviéndose en una línea recta, a menos que sufra la influencia de algo que le desvíe de su camino. Newton supuso que si la Luna no salía disparada en línea recta, según una línea tangencial a su órbita, se debía a la presencia de otra fuerza que la empujaba en dirección a la Tierra, y que desviaba constantemente su camino convirtiéndolo en un círculo. Newton llamó a esta fuerza gravedad y creyó que actuaba a distancia. No hay nada que conecte físicamente la tierra y la luna y sin embargo la Tierra está constantemente tirando de la Luna hacia nosotros. Newton se sirvió de la tercera ley de kepler y dedujo matemáticamente la naturaleza de la fuerza de la gravedad. Demostró que la misma fuerza que hacía caer una manzana sobre la Tierra mantenía a la Luna en su órbita.
La primera ley de Newton establece la equivalencia entre el estado de reposo y de movimiento rectilíneo uniforme. Supongamos un sistema de referencia S y otro S´ que se desplaza respecto del primero a una velocidad constante. Si sobre una partícula en reposo en el sistema S´ no actúa una fuerza neta, su estado de movimiento no cambiará y permanecerá en reposo respecto del sistema S´ y con movimiento rectilíneo uniforme respecto del sistema S. La primera ley de Newton se satisface en ambos sistemas de referencia. A estos sistemas en los que se satisfacen las leyes de Newton se les da el nombre de sistemas de referencia inerciales. Ningún sistema de referencia inercial tiene preferencia sobre otro sistema inercial, son equivalentes: este concepto constituye el principio de relatividad de Galileo o newtoniano.
El enunciado fundamental que podemos extraer de la ley de Newton es que la
.
Esta expresión es una ecuación vectorial, ya que tanto la fuerza como
la aceleración llevan dirección y sentido. Por otra parte, cabe destacar
que la aceleración no es la variación de la posición, sino que es la
variación con la que varía la velocidad.De la ecuación
podemos deducir que si actúan fuerzas sobre los cuerpos, el cambio que
se provoca en su aceleración es proporcional a la fuerza aplicada y
dicho cambio se produce en la dirección sobre la que se apliquen dichas
fuerzas.Sistemas de referencia inerciales
La primera ley de Newton sirve para definir un tipo especial de sistemas de referencia conocidos como sistemas de referencia inerciales, que son aquellos desde los que se observa que un cuerpo sobre el que no actúa ninguna fuerza neta se mueve con velocidad constante.Un sistema de referencia con aceleración (y la aceleración normal de un sistema rotatorio se incluye en esta definición) no es un sistema inercial, y la observación de una partícula en reposo en el propio sistema no satisfará las leyes de Newton (puesto que se observará aceleración sin la presencia de fuerza neta alguna). Se denominan sistemas de referencia no inerciales.

Diferencia de planteamiento de un problema debido a la posibilidad de
observarlo desde dos puntos de vista: el punto de vista de un observador
externo (inercial) o desde un observador interno
- Observador inercial: desde su punto de vista el bloque se mueve en
círculo con velocidad v y está acelerado hacia el centro de la
plataforma con una aceleracion centripeta
 . Esta aceleración es consecuencia de la fuerza ejercida por la tensión de la cuerda.
. Esta aceleración es consecuencia de la fuerza ejercida por la tensión de la cuerda. - Observador no inercial: para el observador que gira con la
plataforma el objeto está en reposo, a = 0. Es decir, observa una fuerza
ficticia que contrarresta la tensión para que no haya aceleración
centrípeta. Esa fuerza debe ser
 .
Este observador siente la fuerza como si fuera perfectamente real,
aunque solo sea la consecuencia de la aceleración del sistema de
referencia en que se encuentra.
.
Este observador siente la fuerza como si fuera perfectamente real,
aunque solo sea la consecuencia de la aceleración del sistema de
referencia en que se encuentra.
y, en consecuencia, podemos considerar que un sistema de referencia de
un observador en la superficie terrestre es un sistema de referencia
inercial.Aplicación de la Primera Ley de Newton
Se puede considerar como ejemplo ilustrativo de esta primera ley una bola atada a una cuerda, de modo que la bola gira siguiendo una trayectoria circular. Debido a la fuerza centrípeta de la cuerda (tensión), la masa sigue la trayectoria circular, pero si en algún momento la cuerda se rompiese, la bola tomaría una trayectoria rectilínea en la dirección de la velocidad que tenía la bola en el instante de rotura.
Segunda Ley de Newton o Ley Fundamental de la dinámica
La Segunda Ley de Newton expresa que:Esta ley se encarga de cuantificar el concepto de fuerza. La aceleración que adquiere un cuerpo es proporcional a la fuerza neta aplicada sobre el mismo. La constante de proporcionalidad es la masa del cuerpo (que puede ser o no ser constante). Entender la fuerza como la causa del cambio de movimiento y la proporcionalidad entre la fuerza impresa y el cambio de la velocidad de un cuerpo es la esencia de esta segunda ley.
Mutationem motus proportionalem esse vi motrici impressæ, & fieri secundum lineam rectam qua vis illa imprimitur. El cambio de movimiento es proporcional a la fuerza motriz impresa y ocurre según la línea recta a lo largo de la cual aquella fuerza se imprime.
Si la masa es constante
Si la masa del cuerpo es constante se puede establecer la siguiente relación, que constituye la ecuación fundamental de la dinámica:Donde m es la masa del cuerpo la cual debe ser constante para ser expresada de tal forma. La fuerza neta que actúa sobre un cuerpo, también llamada fuerza resultante, es el vector suma de todas las fuerzas que sobre él actúan. Así pues:

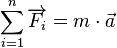
- La aceleracion que adquiere un cuerpo es proporcional a la fuerza aplicada, y la constante de proporcionalidad es la masa del cuerpo.
- Si actúan varias fuerzas, esta ecuación se refiere a la fuerza resultante, suma vectorial de todas ellas.
- Esta es una ecuación vectorial, luego se debe cumplir componente a componente.
- En ocasiones será útil recordar el concepto de componentes intrisecas: si la trayectoria no es rectilínea es porque hay una aceleración normal, luego habrá también una fuerza normal (en dirección perpendicular a la trayectoria); si el modulo de la velocidad varía es porque hay una aceleración en la dirección de la velocidad (en la misma dirección de la trayectoria).
- La fuerza y la aceleración son vectores paralelos, pero esto no significa que el vector velocidad sea paralelo a la fuerza. Es decir, la trayectoria no tiene por qué ser tangente a la fuerza aplicada (sólo ocurre si al menos, la dirección de la velocidad es constante).
- Esta ecuación debe cumplirse para todos los cuerpos. Cuando analicemos un problema con varios cuerpos y diferentes fuerzas aplicadas sobre ellos, deberemos entonces tener en cuenta las fuerzas que actúan sobre cada uno de ellos y el principio de superposición de fuerzas. Aplicaremos la segunda ley de Newton para cada uno de ellos, teniendo en cuenta las interacciones mutuas y obteniendo la fuerza resultante sobre cada uno de ellos.

Representación del sumatorio de las fuerzas. Aquí se está sumando dos
veces la fuerza No. 2. La resultante (marcada con rojo) responde a la
siguiente ecuación: 
De esta ecuación se obtiene la unidad de medida de la fuerza en el sistema internacional de unidades, el Newton:
Por otro lado, si la fuerza resultante que actúa sobre una partícula no es cero, esta partícula tendrá una aceleración proporcional a la magnitud de la resultante y en dirección de esta (debido a que la masa siempre es un escalar positivo). La expresión anterior así establecida es válida tanto para la mecanica clasica como para la mecanica relativistas (la dinámica clásica afirma que la masa de un cuerpo es siempre la misma, con independencia de la velocidad con la que se mueve, la mecánica relativista establece que la masa de un cuerpo aumenta al crecer la velocidad).

Si la masa no es constante
Si la masa de los cuerpos varia, como por ejemplo un cohete que va quemando combustible, no es válida la relación
y hay que hacer genérica la ley para que incluya el caso de sistemas en
los que pueda variar la masa. Para ello primero hay que definir una
magnitud física nueva, la cantidad del moviiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:Newton enunció su ley de una forma más general:

De esta forma se puede relacionar la fuerza con la aceleración y con la masa, sin importar que esta sea o no sea constante. Cuando la masa es constante sale de la derivada con lo que queda la expresión:

Y se obtiene la expresión clásica de la Segunda Ley de Newton:

La fuerza, por lo tanto, es un concepto matemático el cual, por definición, es igual a la derivada con respecto al tiempo del momento de una partícula dada, cuyo valor a su vez depende de su interacción con otras partículas. Por consiguiente, se puede considerar la fuerza como la expresión de una interaccion. Otra consecuencia de expresar la Segunda Ley de Newton usando la cantidad de movimiento es lo que se conoce como principio de la cantidad del movimiento: si la fuerza total que actúa sobre un cuerpo es cero, la Segunda ley de Newton nos dice que

Es decir, la derivada de la cantidad de movimiento con respecto al tiempo es cero en sus tres componentes. Esto significa que la cantidad de movimiento debe ser constante en el tiempo en módulo dirección y sentido (la derivada de un vector constante es cero).

La Segunda Ley de Newton solo es válida en sistema de referencias inerciales pero incluso si el sistema de referencia es no inercial, se puede utilizar la misma ecuación incluyendo las fuerzas ficticias (o fuerzas inerciales). Unidades y dimensiones de la fuerza:
- Unidades S.I.:

- Sistema cegesimal: dina=2
- Equivalencia: 1 N=
 dinas
dinas
Cantidad de movimiento o momento lineal
En el lenguaje moderno la cantidad de movimiento o momento lineal de un objeto se define mediante la expresión.
Es decir, es una magnitud vectorial proporcional a la masa y a la
velocidad del objeto. Partiendo de esta definición y aplicando la ley
fundamental de la mecánica de Newton, las variaciones de la cantidad de
movimiento se expresan en función de la fuerza resultante y el intervalo
de tiempo durante el cual se ejerce esta:
Al vector
 se le denomina impulso lineal y representa una magnitud física que se
manifiesta especialmente en las acciones rápidas o impactos, tales como
choques, llevando módulo dirección y sentido. En este tipo de acciones
conviene considerar la duración del impacto y la fuerza ejercida durante
el mismo.
se le denomina impulso lineal y representa una magnitud física que se
manifiesta especialmente en las acciones rápidas o impactos, tales como
choques, llevando módulo dirección y sentido. En este tipo de acciones
conviene considerar la duración del impacto y la fuerza ejercida durante
el mismo.De la expresión obtenida se deduce que el impulso lineal es igual a la variación de la cantidad de movimiento. Si la fuerza resultante es cero (es decir, si no se actúa sobre el objeto) el impulso también es cero y la cantidad de movimiento permanece constante. Llamamos a esta afirmación ley de conservación del impulso lineal, aplicada a un objeto o una partícula.
Sus unidades en el Sistema Internacional son
- Conservación de la cantidad de movimiento

Bolas representando choque elástico
- choque elastico: permanecen constantes la cantidad de movimiento y la energía cinética. Dos partículas de masas diferentes que solo interactúan entre sí y que se mueven con velocidades constantes y distintas una hacia la otra. Tras el choque, permanece constante la cantidad de movimiento y la energía cinética.

Coches representando choque inelástico
- choque inelastico: permanece constante la cantidad de movimiento y varía la energía cinética. Como consecuencia, los cuerpos que colisionan pueden sufrir deformaciones y aumento de su temperatura. Tras un choque totalmente inelástico, ambos cuerpos tienen la misma velocidad. La suma de sus energias cineticas es menor que la inicial porque una parte de esta se ha transformado en energia interna; en la mayoría de los casos llega a ser disipada en forma de calor debido al calentamiento producido en el choque. En el caso ideal de un choque perfectamente inelástico entre objetos macroscópicos, estos permanecen unidos entre sí tras la colisión.

- caida libre: es un movimiento que se observa cuando un objeto se deja caer desde una cierta altura sobre la superficie de la tierra. Para estudiar el movimiento se elige un sistema de coordenadas donde el origen del eje y está sobre esta última. En este sistema tanto la velocidad de caída como la aceleración de la gravedad tienen signo negativo. En el ejemplo representado, se supone que el objeto se deja caer desde el reposo, pero es posible que caiga desde una velocidad inicial distinta de cero.18

Péndulo Simple: Diagrama de Fuerzas
- pendulo simple: partícula de masa m suspendida del punto O por un hilo inextensible de longitud l y de masa despreciable. Si la partícula se desplaza a una posición θ0 (ángulo que hace el hilo con la vertical) y luego se suelta, el péndulo comienza a oscilar. El pendulo describe una trayectoria circular, un arco de una circunferencia de radio l. Las fuerzas que actúan sobre la partícula de masa m son dos, el peso y la tension T del hilo.
donde an representa la aceleración normal a la trayectoria. Conocido el valor de la velocidad v en la posición angular se puede determinar la tensión T del hilo. Esta es máxima cuando el péndulo pasa por la posición de equilibrio

,

donde el segundo término representa la fuerza centrífuga.
Y la tensión es mínima, en los extremos de su trayectoria, cuando la velocidad es cero
en la dirección tangencial:

donde at representa la aceleración tangente a la trayectoria.

TERCERA LEY DE NEWTON
Esta tercera ley de Newton es completamente original (pues las dos primeras ya habían sido propuestas de otra manera por Galileo, hooke hace de las leyes de la mecanica un conjunto lógico y completo. Expone que por cada fuerza que actúa sobre un cuerpo, este realiza una fuerza de igual intensidad, pero de sentido contrario sobre el cuerpo que la produjo. Dicho de otra forma, las fuerzas, situadas sobre la misma recta, siempre se presentan en pares de igual magnitud y de dirección, pero con sentido opuesto. Si dos objetos interaccionan, la fuerza F12, ejercida por el objeto 1 sobre el objeto 2, es igual en magnitud con misma dirección pero sentidos opuestos a la fuerza F21 ejercida por el objeto 2 sobre el objeto 1:
Actioni contrariam semper & æqualem esse reactionem: sive corporum duorum actiones in se mutuo semper esse æquales & in partes contrarias dirigi. Con toda acción ocurre siempre una reacción igual y contraria: quiere decir que las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en sentido opuesto.

La fuerza de reacción (flecha verde) aumenta conforme aumenta la aplicada al objeto, la fuerza aplicada (flecha roja)
Aplicaciones de la Tercera Ley de Newton
Algunos ejemplos donde actúan las fuerzas acción-reacción son los siguientes:- Si una persona empuja a otra de peso similar, las dos se mueven con la misma velocidad pero en sentido contrario.
- Cuando saltamos, empujamos a la tierra hacia abajo, que no se mueve debido a su gran masa, y esta nos empuja con la misma intensidad hacia arriba.
- Una persona que rema en una lancha empuja el agua con el remo en un sentido y el agua responde empujando la lancha en sentido opuesto.
- Cuando caminamos empujamos a la tierra hacia atrás con nuestros pies, a lo que la tierra responde empujándonos a nosotros hacia delante, haciendo que avancemos.
- Cuando se dispara una bala, la explosión de la pólvora ejerce una fuerza sobre la pistola (que es el retroceso que sufren las armas de fuego al ser disparadas), la cual reacciona ejerciendo una fuerza de igual intensidad pero en sentido contrario sobre la bala.
- La fuerza de reacción que una superficie ejerce sobre un objeto apoyado en ella, llamada fuerza normal con dirección perpendicular a la superficie.

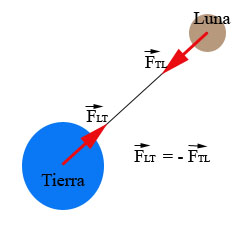
- Las fuerzas a distancia no son una excepción, como la fuerza que la Tierra ejerce sobre la Luna y viceversa, su correspondiente pareja de acción y reacción:
Además, la fuerza que la Luna ejerce sobre la Tierra es también responsable de las mareas, pues conforme la Luna gira alrededor de la Tierra esta ejerce una fuerza de atracción sobre la superficie terrestre, la cual eleva los mares y océanos, elevando varios metros el nivel del agua en algunos lugares; por este motivo esta fuerza también se llama fuerza de mareaLa fuerza de marea de la luna se compone con la fuerza de marea del sol proporcionando el fenómeno completo de las mareas.
AQUI TAMBIEN PODEMOS VER LOS EJEMPLOS CUANDO LA MASA NO ES CONSTANTE:
y hay que hacer genérica la ley para que incluya el caso de sistemas en
los que pueda variar la masa. Para ello primero hay que definir una
magnitud física nueva, la cantidad de movimiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:Newton enunció su ley de una forma más general:
De esta forma se puede relacionar la fuerza con la aceleración y con la masa, sin importar que esta sea o no sea constante. Cuando la masa es constante sale de la derivada con lo que queda la expresión:
Y se obtiene la expresión clásica de la Segunda Ley de Newton:
La fuerza, por lo tanto, es un concepto matemático el cual, por definición, es igual a la derivada con respecto al tiempo del momento de una partícula dada, cuyo valor a su vez depende de su interacción con otras partículas. Por consiguiente, se puede considerar la fuerza como la expresión de una interaccion. Otra consecuencia de expresar la Segunda Ley de Newton usando la cantidad de movimiento es lo que se conoce como principio de conservacion de la cantidad del movimiento: si la fuerza total que actúa sobre un cuerpo es cero, la Segunda ley de Newton nos dice que
AQUI EN EL BLOG TAMBIEN PODRAS ENCONTRAR VIDEOS ACERCA DE ESTE FISICO TAN IMPORTANTE: ACONTINUACION LO PODRAS VER
ISAAC NEWTON FISICO.....
No hay comentarios:
Publicar un comentario